
Alurity 1.0 release, a toolbox for robot cybersecurity
Alurity is a modular and composable toolbox for robot cybersecurity empowering security research in robotics.


We are extremely proud to share that after more than a year of testing it on a variety of use cases, we've released alurity 1.0 to our customers.
Alurity is a modular and composable toolbox for robot cybersecurity. It ensures that both roboticists and security researchers working on a project, have a common, consistent and easily reproducible development environment facilitating the security process and the collaboration across teams. It’s available for Linux (across distributions) and Mac OS, with limited support at the time of writing for Windows.
Featuring dozens of different tools in the form of individual modules, alurity simplifies and speeds up the cybersecurity research in robotics. The toolbox organizes security and robotics components in different groups that allow for easy composition and use.
The main feature of this release include:
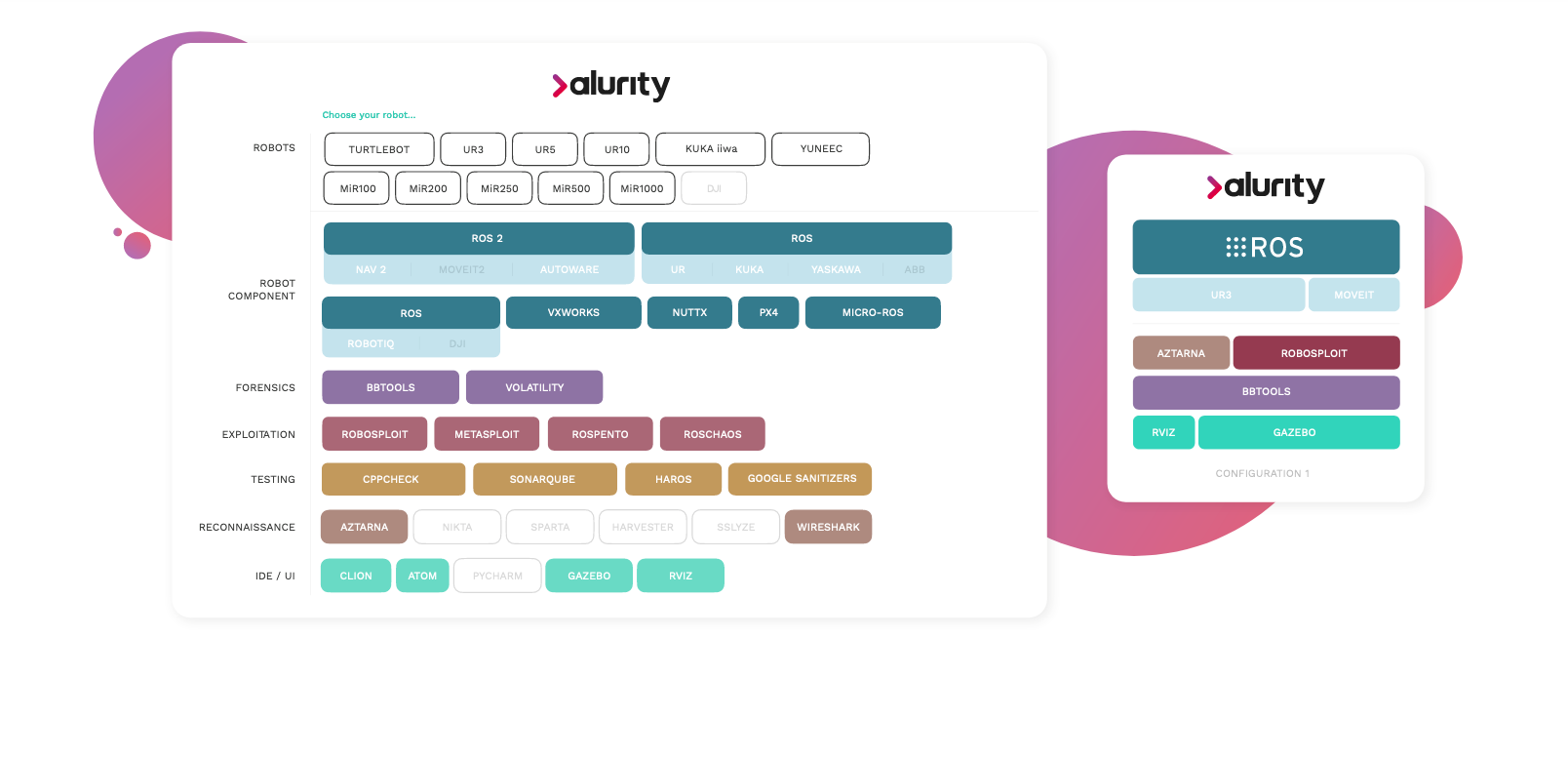
- More than 25 robots available (each with multiple versions) as base modules, and several dozens of robot components: this includes industrial robots from Universal Robots, Mobile Industrial Robots, KUKA or ABB among others. Components like ROS and ROS 2 packages, RTOSs, communication frameworks, drone middlewares and much, much more.
- Utilities to facilitate the cybersecurity processes: including security
flowsandpipelineswhich reflect the modular nature of robotics while at the same time make the resulting complexity easier to handle for roboticists and cybersecurity researchers. - Capabilities for mixed simulation and emulation environments in robotics. This helps research scenarios involving high-fidelity virtual versions of hardware and software robot components.
- Composability between virtual modules and networks: the toolbox provides modules that can be selected and assembled in various combinations, providing facilities for automation of security testing, evaluation and demonstration while enhancing the triage and reproducibility of security flaws. In addition, alurity allows to easily build robotic subjects of study through the virtualization of different robots, networks (e.g. LANs, serial comms, VPNs, VLANs, VXLANs, WLANs, etc) and robot components, including security protection mechanisms.
If you wish to learn more about the capabilities, refer to https://arxiv.org/pdf/2010.07759.pdf for a research report of the current capabilities of alurity.
If cybersecurity in robotics is something you care about, reach out to us so that we can help you accelerate your work.